Radar and Electro-Optical Systems for Drone Detection
Jun 18 2026
Introduction
Most counter-drone articles spend most of their time on radio frequency detection. That’s understandable. RF is versatile, passive, and cost-effective. But if you’ve deployed RF detection at any scale, you already know its limits. Autonomous drones don’t phone home. Modified UAVs use frequencies you’re not monitoring. DIY builds run on custom protocols that never get added to any library. RF sees all of these the same way: nothing.
When RF alone can’t give you the coverage picture you need, you move to active sensing. Radar and electro-optical systems fill the gaps that passive detection leaves open. They won’t replace RF in most architectures, but they change what the architecture is capable of.
This article walks through both technologies, what they do well, what they don’t, and how they fit into a real deployment. If you’re trying to figure out whether active sensing belongs in your counter-drone setup, this is the framework.
Radar for drone detection
How drone detection radar works
Radar works by sending out radio pulses and analyzing what comes back. That’s the basic principle, whether you’re tracking passenger jets or small UAVs. The difference is in the execution.
Standard air traffic radar is built for large metal aircraft. A Boeing 737 has a radar cross-section of roughly 20 to 80 square meters. A DJI Mavic 4 comes in at about 0.02 square meters, smaller than a baseball. Conventional radar filters objects of that size as noise. Counter-drone radar is a different product. It uses higher frequencies, X-band or Ku-band, and advanced signal processing to detect and track drone-sized objects.
Phased-array radar is the architecture most commonly specified for counter-drone work. Instead of a rotating dish, it uses an array of antenna elements that steer the beam electronically. That means faster scanning, more precise control, and no moving parts to fail. It’s also how modern military radar works, which should tell you something about its capability.
The key measurement that separates a useful counter-drone radar from a generic one: what’s the smallest detectable object at what range? A radar that can’t track a 0.02 square meter target at 2 kilometers isn’t solving the problem.
What radar actually gives you
Radar gives you range, bearing, and velocity of anything in its coverage volume. It works in all weather, day or night. It doesn’t care whether the drone is transmitting or flying autonomously. If something is moving through the airspace at drone-like speeds, radar will see it.
What radar doesn’t give you is identification. A radar track says there’s a small, slow airborne object at position X. It doesn’t tell you whether that’s a DJI Matrice, a homebuilt quadcopter, or a large bird. You need a second sensor for that.
The other constraint is clutter. Urban environments with lots of buildings and moving vehicles generate radar reflections. Without good filtering, your operators end up with thousands of tracks to sort through. This is where signal processing matters: modern counter-drone radar uses micro-Doppler analysis to distinguish the spinning rotor signature of a drone from the return of a truck or a bird.
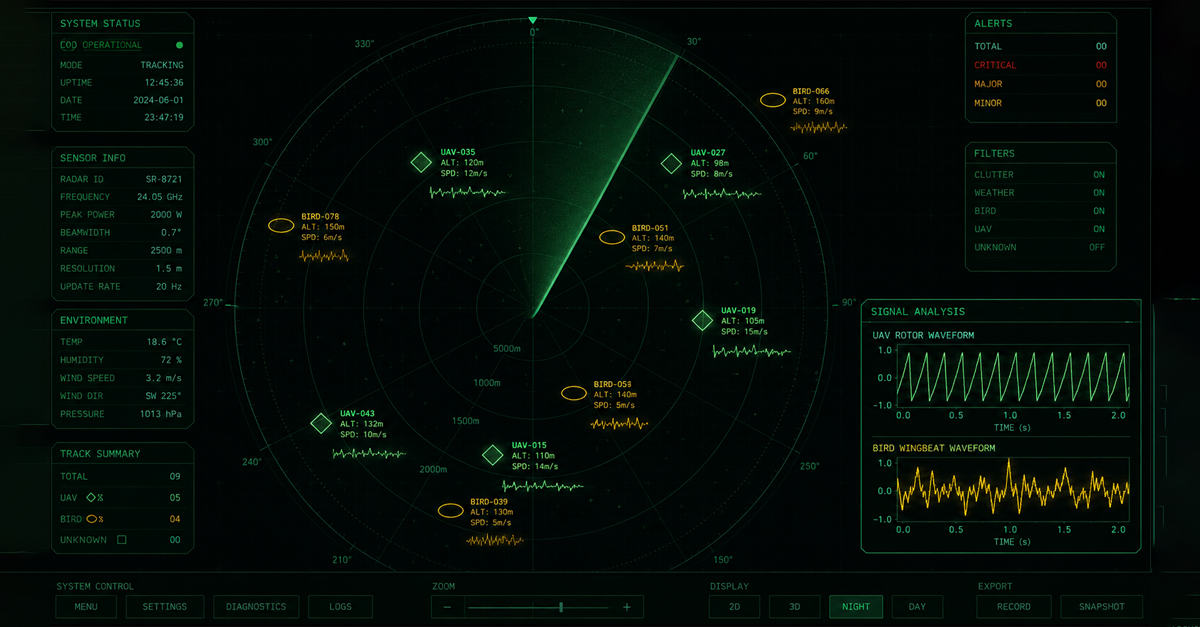
The bird problem
Every counter-drone operator who has deployed radar near wildlife has a story about the pigeon incident. Birds and small drones produce similar radar signatures. Without good classification processing, a flock crossing your perimeter can generate dozens of tracks that look just like drone incursions.
The micro-Doppler signature is the key differentiator. A drone rotor produces a periodic, high-frequency return that looks like a sawtooth pattern on the Doppler spectrum. A bird’s wingbeat produces something slower and more irregular. Good counter-drone radar can classify these with reasonable accuracy, but it’s not perfect. Hovering drones produce minimal rotor return, and some large birds generate signals that look like small drones.
When you’re evaluating counter-drone radar, ask for the bird classification rate in the vendor’s test data. A 90% classification accuracy sounds solid until you run the math: at a site near a wildlife area with frequent bird crossings, 10% false positives add up fast. That’s hours of operator time spent confirming that the track is not actually a drone.
Most serious deployments handle this by layering: radar handles early detection and rough tracking, and a second sensor confirms what the radar found. We’ll get into that below.
TR100: radar and EO/IR in one package
The TR100 is LZ TECH’s answer to the sensor integration problem. Instead of buying radar from one vendor and cameras from another and figuring out how to make them talk to each other, the TR100 packages phased-array radar, visible-light cameras, thermal imaging, and wide-angle optics in a single unit. Radar detects and tracks the target. The EO/IR payload immediately slews to the bearing and provides visual confirmation.
The workflow is radar-guided. The radar detects something in the coverage volume, classifies it as a potential drone, and points the cameras at it. An operator or AI processing confirms: drone, model, threat level. This is faster than having an operator monitor a raw radar feed and manually cue cameras, which is what happens when sensors come from different vendors and don’t integrate.
Fixed-site deployments that need continuous perimeter coverage are where the TR100 makes most sense. Airports, prisons, power plants, government facilities. The all-in-one form factor simplifies installation and reduces the integration headache. The tradeoff is that you’re buying a complete sensor package whether you use all of it or not. For mobile or tactical applications, a different configuration usually works better.
Electro-optical and infrared systems
What EO/IR actually does
Electro-optical systems are cameras. Visible-light cameras capture what you can see. Infrared cameras capture heat signatures. Thermal imaging reads the infrared radiation emitted by objects, which means it works in the dark, through haze, and in conditions where visible-light cameras struggle.
The use case breaks into two modes: confirmation and primary detection. In most architectures, EO/IR is confirmation. Something else finds the drone. The cameras point at it and confirm: yes, that’s a drone, here’s the model, here’s what it’s doing. In this role, cameras are evidence and identification tools, not primary sensors.
Using optical systems for primary detection is technically possible but practically demanding. You need cameras covering 360 degrees, software that can scan for small moving objects, and enough processing power to handle the output without generating a wall of false alerts. It’s not impossible, but it’s a different engineering problem than mounting a zoom camera on a pan-tilt head and slewing it to a bearing.
Dual-spectrum imaging
Most serious counter-drone cameras combine visible-light and thermal sensors in one housing. Visible-light gives you the detail you need for identification: color, markings, payload indicators. Thermal tells you where to look at night or in fog.
A drone’s motors and electronics generate heat. At night or in low visibility, a thermal camera can pick up a drone at ranges where a visible-light camera sees nothing. The tradeoff is resolution: thermal cameras at the price points realistic for most deployments don’t give you the same identification confidence as optical. You can confirm there’s something there. You might not be able to confirm exactly what it is at maximum range.
For 24-hour coverage, dual-spectrum is the minimum configuration. Single-spectrum thermal works for detection. Single-spectrum optical works for daytime identification. Only dual-spectrum gives you both.
AI-enhanced visual detection
The manual detection problem in optical systems is real. An operator watching a camera feed for drone intrusions will miss things, especially when nothing is happening for long stretches and then multiple things happen at once. AI changes the economics of visual detection by automating the hard part.
Modern systems use computer vision models trained on drone imagery to automatically detect and classify objects in the camera’s field of view. The system flags potential drones without requiring an operator to be watching. It also handles the drone versus bird classification problem, though not perfectly.
The other piece is intelligent gimbal control. Good EO/IR systems don’t just stare at a fixed field of view. They use motion detection and predictive tracking to keep moving targets in frame. Once a drone enters the coverage area, the system tracks it across multiple camera positions if the target moves.
LZ TECH’s VAR300 is positioned around autonomous scanning. The claim is that it can operate without an external cue from radar or RF, using its own AI visual processing to detect and track drones. If that works as described, it changes the deployment model: a site could run VAR300 as a standalone detection layer without integrating other sensor types. Whether that’s the right architecture depends on the threat model and budget.
T100: PTZ tracking and pointing
The T100 is LZ TECH’s long-range PTZ tracking system. The specs that matter: 6.1 millimeter to 561 millimeter focal length. That range covers wide-area surveillance at the short end and precise identification at the long end. Daylight identification range is specified at 2 kilometers or more against a DJI Mavic 3 reference target. Thermal performance at night is specified at 1 kilometer under similar conditions.
The longer focal length is where the T100 earns its position in a deployment. When you need to confirm what a drone is doing at distance, a PTZ with serious zoom is the tool. A guard on patrol with a handheld thermal monocular can confirm there’s something in the air. The T100 can confirm the model, read any visible markings, track the flight path, and record the trajectory for evidence.
Trajectory recording is the forensic piece. A thermal clip of a drone hovering over a restricted area is useful for reporting. A video recording with time-stamped position data and zoom level is useful for prosecution. Different sites have different needs here. Government facilities and airports usually need the evidence chain. Private facilities often don’t.

Why you need both radar and EO/IR
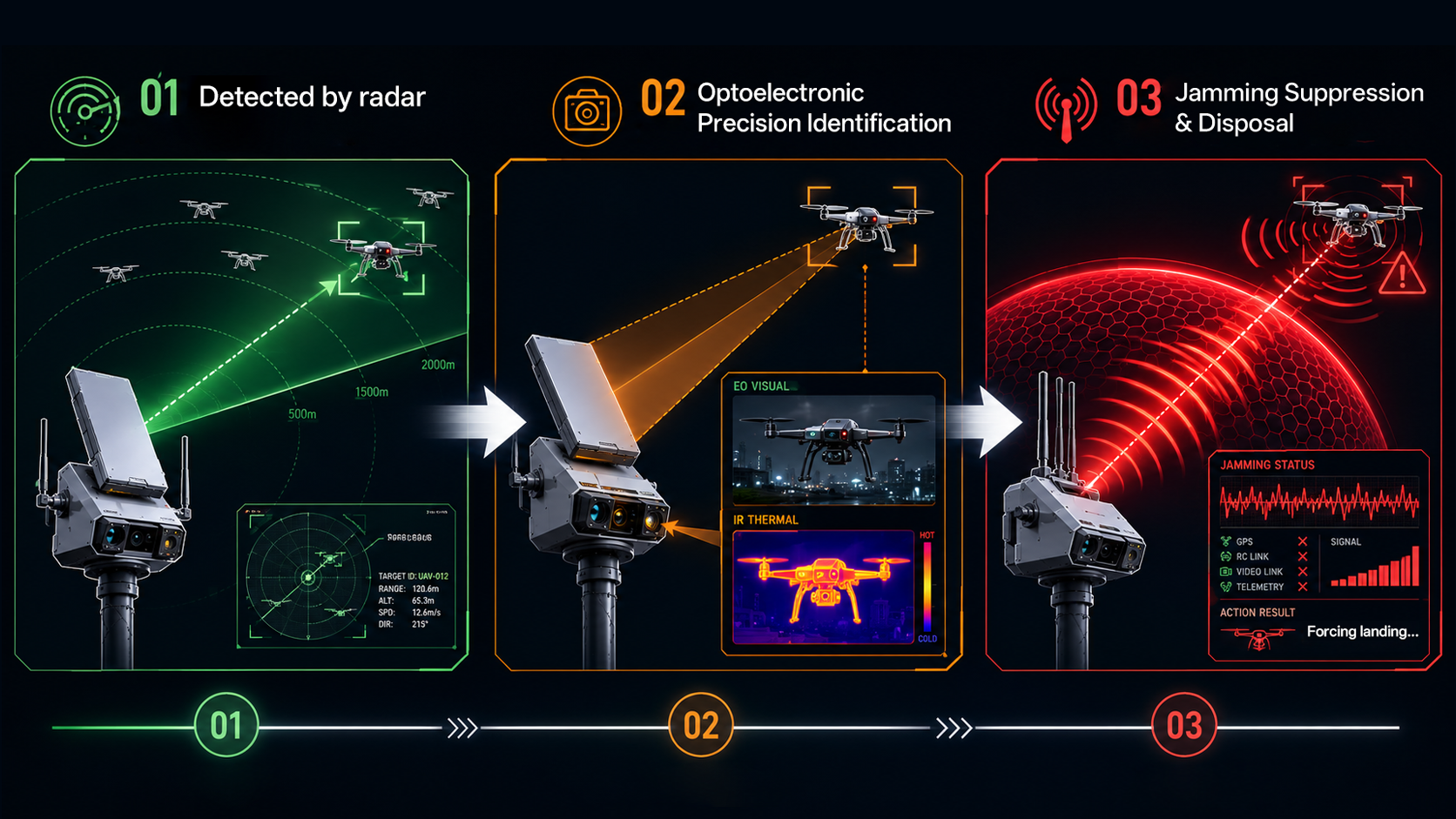
Here’s how a properly integrated radar-EO/IR system works in practice. Something enters the radar coverage volume. The radar detects it, classifies it as a potential drone based on size and movement profile, and calculates the bearing and range. That bearing is passed to the EO/IR system within milliseconds. The cameras slew to the correct heading and zoom level automatically. An operator or AI confirms: drone, model, intent assessment. If response is warranted, the system is already tracking the target with cameras.
Without that integration, you have two separate workflows. The radar operator sees a track and has to manually cue the cameras to that bearing. That takes seconds, during which the target might move. If multiple tracks appear simultaneously, the operator is juggling. Under stress, with adrenaline, during a real incident, that lag matters.
The other reason integration matters: confirmation is not optional for most response decisions. If your response to a drone is jamming its link, you want to be reasonably confident that what you’re jamming is actually a drone and not a bird, a plastic bag, or a weather balloon. Radar alone doesn’t give you that confidence. Cameras do.
LZ TECH’s Multi-tech Fusion Detection Solution is designed around this integration model. Radar and EO/IR are part of the same system, sharing data through the C2 layer. The vendor argument is that buying the pieces separately and integrating them yourself is the expensive and time-consuming path. It’s a reasonable argument for sites that don’t have an engineering team that wants to own the integration.
Choosing the right active sensing configuration
Fixed-site deployments with continuous monitoring needs are the clearest case for integrated radar-EO/IR. Airports, critical infrastructure, government facilities. These sites need 24/7 coverage, fast response times, and a clear evidence chain. The TR100 handles all of that in a single installation.
Sites that already have RF detection and want to add active sensing without a full integrated system can add T100 cameras to an existing setup. The cameras don’t require radar as a cue, though they’ll perform better with it. This is a reasonable upgrade path for sites that deployed RF first and are now expanding coverage.
VAR300 is the autonomous option. If the deployment scenario requires a sensor that can detect and track drones without relying on other systems, VAR300’s standalone AI visual processing is worth evaluating. The tradeoff versus integrated radar-EO/IR is that visual-only detection has a harder time in poor weather and at longer ranges than radar-assisted systems.
The question we keep coming back to is the same one that drives the rest of the counter-drone architecture: what are you actually defending against? Amateur operators near your perimeter don’t need the same sensor configuration as sophisticated actors running modified UAVs with intentional evasion tactics. Match the active sensing investment to the actual threat profile, not to the specifications of the most capable system available.
The bottom line
Radar and EO/IR fill the gaps that passive RF detection leaves open. They handle autonomous drones, provide visual confirmation for response decisions, and give you an evidence chain for anything you decide to act on.
Radar alone is early warning without identification. EO/IR alone is confirmation without the range to find targets on its own. Together, they complete the detection loop that RF starts.
Integrated systems like the TR100 simplify deployment by removing the integration problem. Modular systems like T100 plus existing sensors give you more flexibility if you have the engineering capability to own the integration yourself.
For sites where autonomous drones are a documented threat, where evidence collection matters, or where RF-only coverage has proven insufficient, active sensing belongs in the architecture. The specific configuration depends on the site, the threat model, and the budget.
Connect with us
Ready to Secure Your Low-Altitude Airspace?